使用场景
自动驾驶系统中用于障碍物检测和距离测量
机器人导航中进行环境感知和路径规划
增强现实应用中实现虚拟对象与现实世界的自然融合
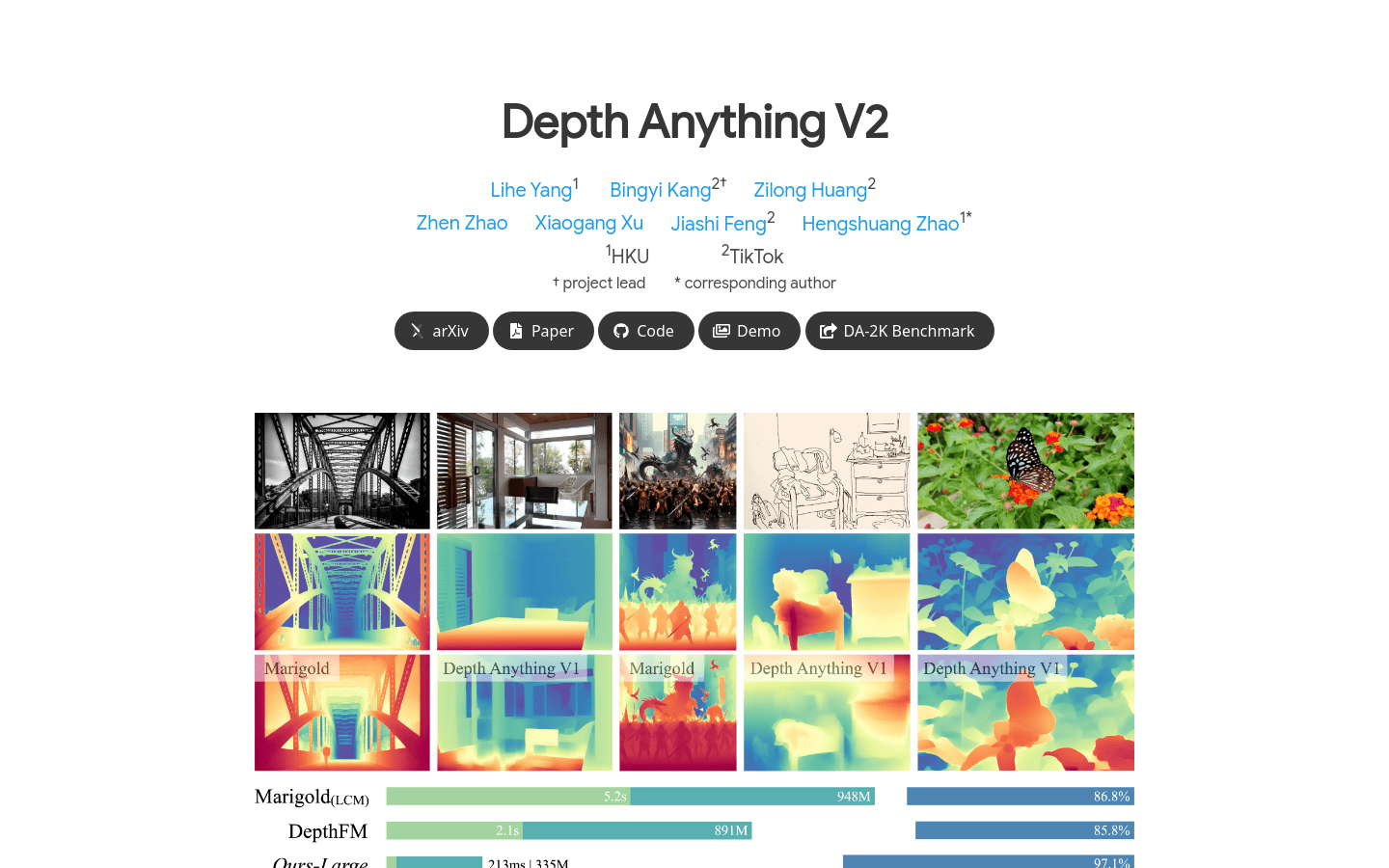
产品特色
提供比前一版本更精细的细节
比Depth Anything V1和基于SD的模型更鲁棒
效率更高,速度提升10倍
轻量级,模型大小从25M到1.3B参数不等
通过大规模伪标记真实图像训练学生模型
构建了一个通用的评估基准,以支持未来研究
使用教程
1. 访问Depth Anything V2的官方网站
2. 了解模型的基本信息和技术参数
3. 下载预训练模型或代码,根据需要进行部署
4. 准备输入图像或视频数据
5. 使用模型进行深度估计,获取深度图
6. 分析深度图结果,应用于特定场景










