使用场景
在虚拟现实中,EgoGaussian可以用于实时重建用户周围的环境,提供沉浸式体验。
自动驾驶汽车可以利用EgoGaussian追踪周围物体的运动,以做出更准确的驾驶决策。
在机器人视觉领域,EgoGaussian帮助机器人理解其操作环境中的动态变化,以更好地与环境互动。
产品特色
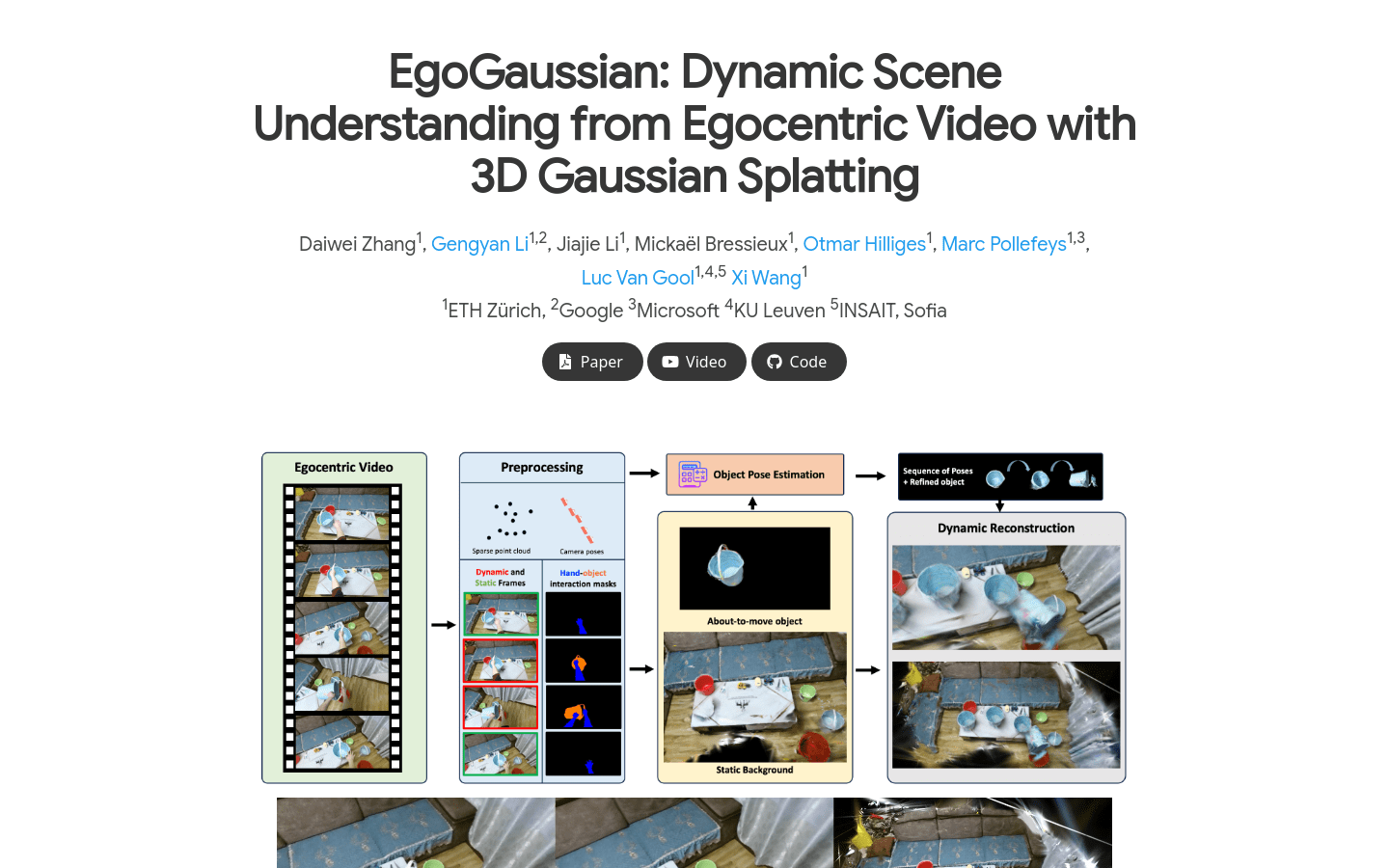
3D场景重建:从RGB输入中重建动态交互的3D场景。
动态物体追踪:追踪场景中刚体物体的运动。
高斯散射技术:利用高斯散射的离散性来分割动态交互。
在线学习流程:片段级别的在线学习,适应人类活动的动态性。
时间顺序重建:按时间顺序重建场景,确保场景的连贯性。
自动分割:自动区分物体和背景的高斯,提供3D表示。
性能优越:在野外视频中超越了先前的技术方法。
使用教程
步骤一:安装并配置EgoGaussian所需的硬件,如头戴式相机。
步骤二:将EgoGaussian模型加载到计算平台上。
步骤三:输入RGB第一人称视角视频数据到EgoGaussian模型中。
步骤四:EgoGaussian模型开始处理视频数据,进行3D场景重建和动态物体追踪。
步骤五:观察并分析EgoGaussian输出的3D场景和物体运动轨迹。
步骤六:根据需要,对EgoGaussian的参数进行调整,以优化场景重建和追踪效果。










