使用场景
在CO3D数据集上进行三维重建
在IMC Phototourism数据集上进行相机和点云重建
在ETH3D数据集上进行相机姿态和3D结构的重建
产品特色
从输入图像中提取2D轨迹
使用图像和轨迹特征重建相机
基于这些轨迹和相机参数初始化点云
应用捆绑调整层进行重建细化
完全可微分的框架设计
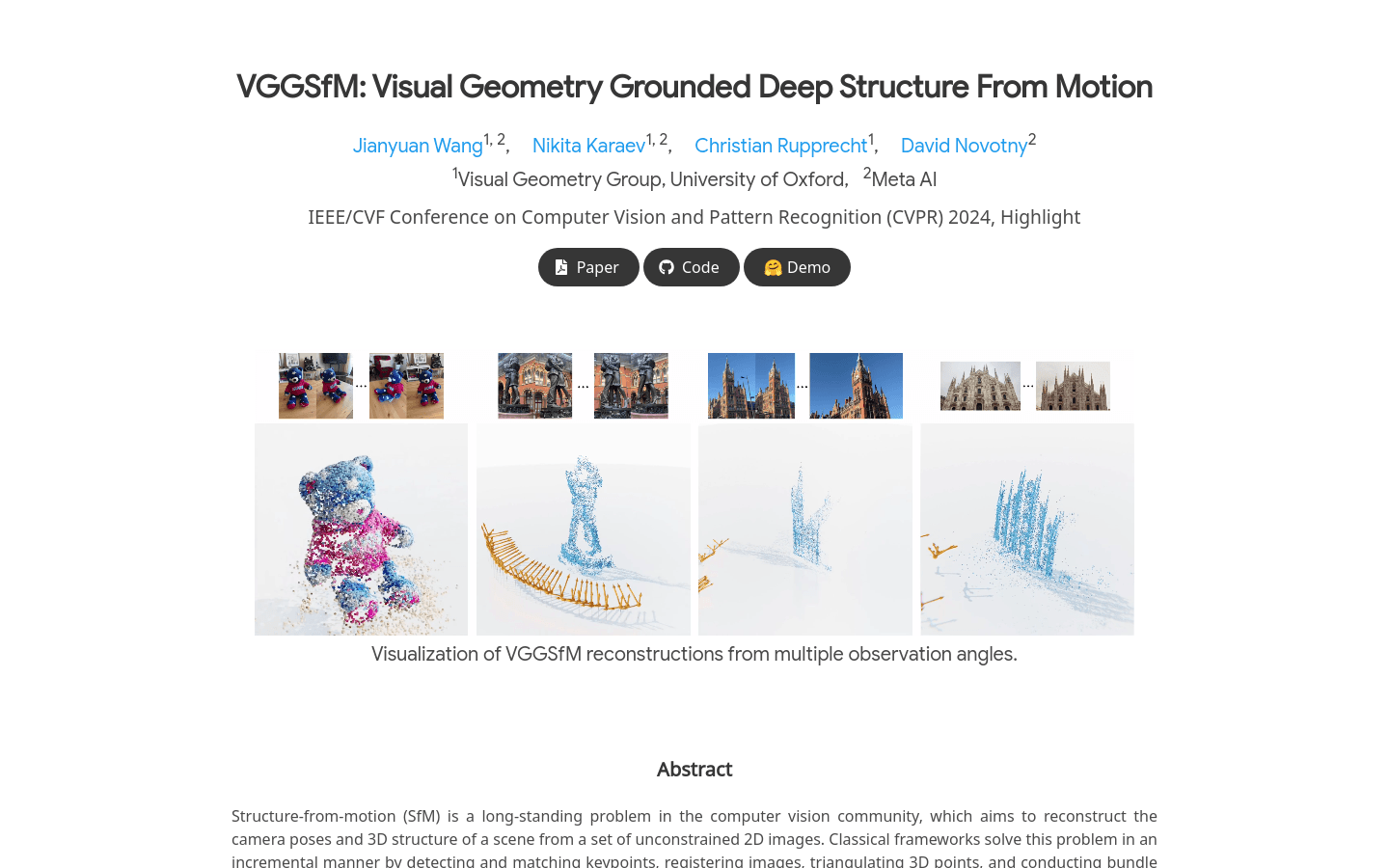
在野外应用中重建照片,展示估计的点云和相机
在Co3D和IMC Phototourism上进行相机和点云重建的定性可视化
在每一行中,最左侧的帧包含查询图像和查询点,预测的轨迹点显示在右侧
使用教程
1. 准备一组不受限制的2D图像作为输入
2. 使用VGGSfM模型从输入图像中提取2D轨迹
3. 利用提取的轨迹和图像特征重建相机
4. 基于轨迹和相机参数初始化点云
5. 应用捆绑调整层进行点云和相机的重建细化
6. 对重建结果进行评估和优化,确保精度和可靠性
7. 将重建的3D结构应用于相关领域,如增强现实、虚拟现实等










