使用场景
在自动化生产线上,使用RobotFingerPrint技术规划机械手的抓取动作,提高装配线的效率。
科研人员利用该技术进行机械手抓取任务的实验研究,探索新的抓取策略。
在机器人教学中,使用该技术作为教学案例,帮助学生理解机械手的抓取原理和应用。
产品特色
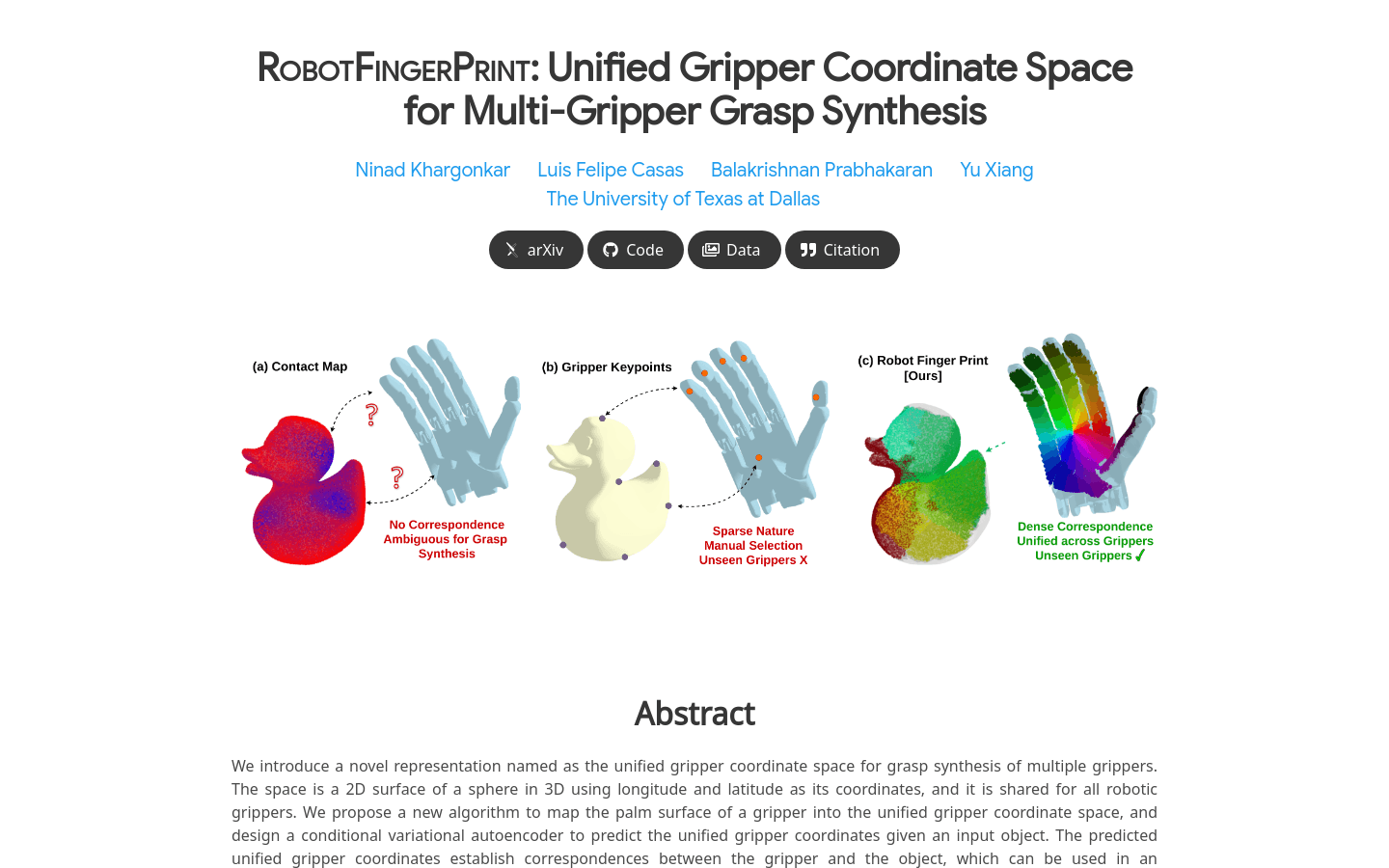
使用经度和纬度作为坐标,创建统一的机械手坐标空间。
通过算法将机械手掌心映射到统一坐标空间。
设计条件变分自编码器预测统一坐标。
优化问题解决抓取姿态和手指关节。
提高抓取合成的成功率和多样性。
适用于多种机械手,具有广泛的应用前景。
使用教程
1. 访问项目代码库IRVLUTD,克隆或下载项目代码。
2. 根据GenDexGrasp的指导设置isaac gym抓取评估环境。
3. 使用学习率0.1和步长0.02配置抓取评估参数。
4. 从Box.com下载机械手表面点坐标和其他元数据文件。
5. 阅读并遵循数据集文件夹中提供的README文件进行整体设置。
6. 将下载的数据集与项目代码结合使用,进行抓取合成实验。
7. 根据实验结果调整算法参数,优化抓取合成效果。
8. 记录实验数据,撰写实验报告或论文。










