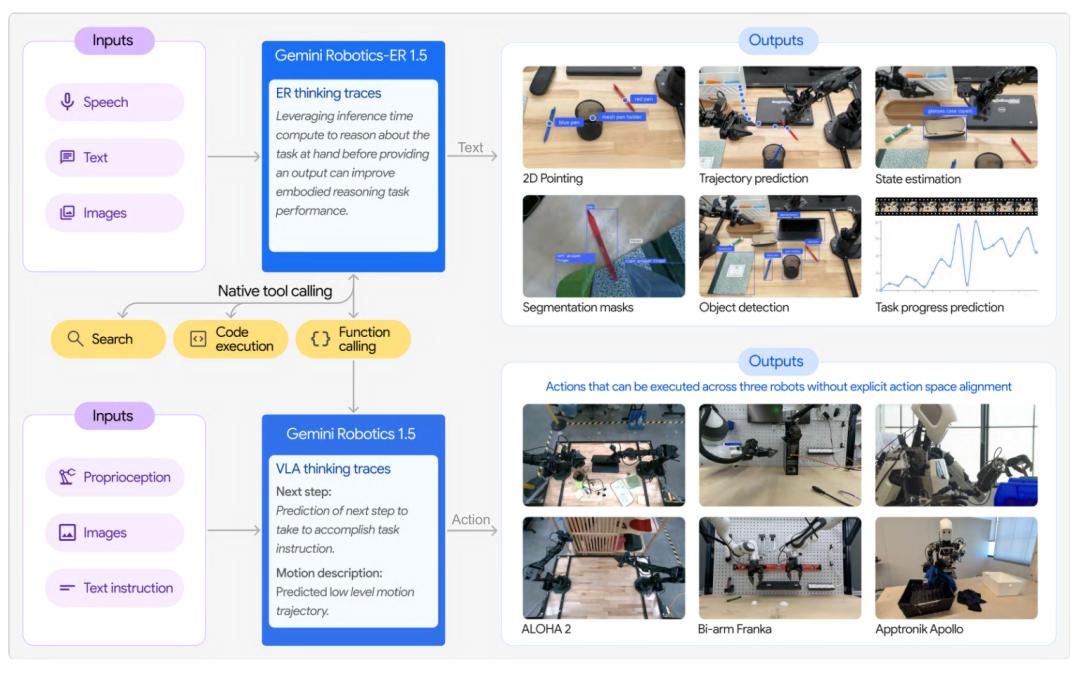
这项专利的核心在于数字孪生技术的应用,它构建了一个包含六个关键模块的系统:环境采集、地图处理、数字舞台孪生、舞蹈动作设计、轨迹规划和舞蹈合成。这些模块通过数据交互和功能协同,形成了一个高效且可扩展的舞蹈设计方案。
该专利的独特之处在于,它能让机器人准确感知并适应舞台环境的变化。通过数字孪生技术,机器人不再是简单地执行预设动作,而是能够实时匹配场景,从而避免出现动作与环境不协调的情况,让表演更加流畅自然。
该技术的突破性在于,它为机器人提供了设计复杂舞台表演的能力。借助这一系统,可以为机器人设计和规划出高难度的舞蹈动作,使其能够胜任更复杂的舞台表演任务。