使用场景
在街景重建中,通过替换提示为车载LiDAR,实现高精度深度估计。
即使抓取策略仅在漫反射物体上训练,该深度估计技术也能帮助抓取透明和镜面物体,性能优于RGB和LiDAR。
通过与Unitree H1机器人的集成,展示了在机器人抓取实验中的应用。
产品特色
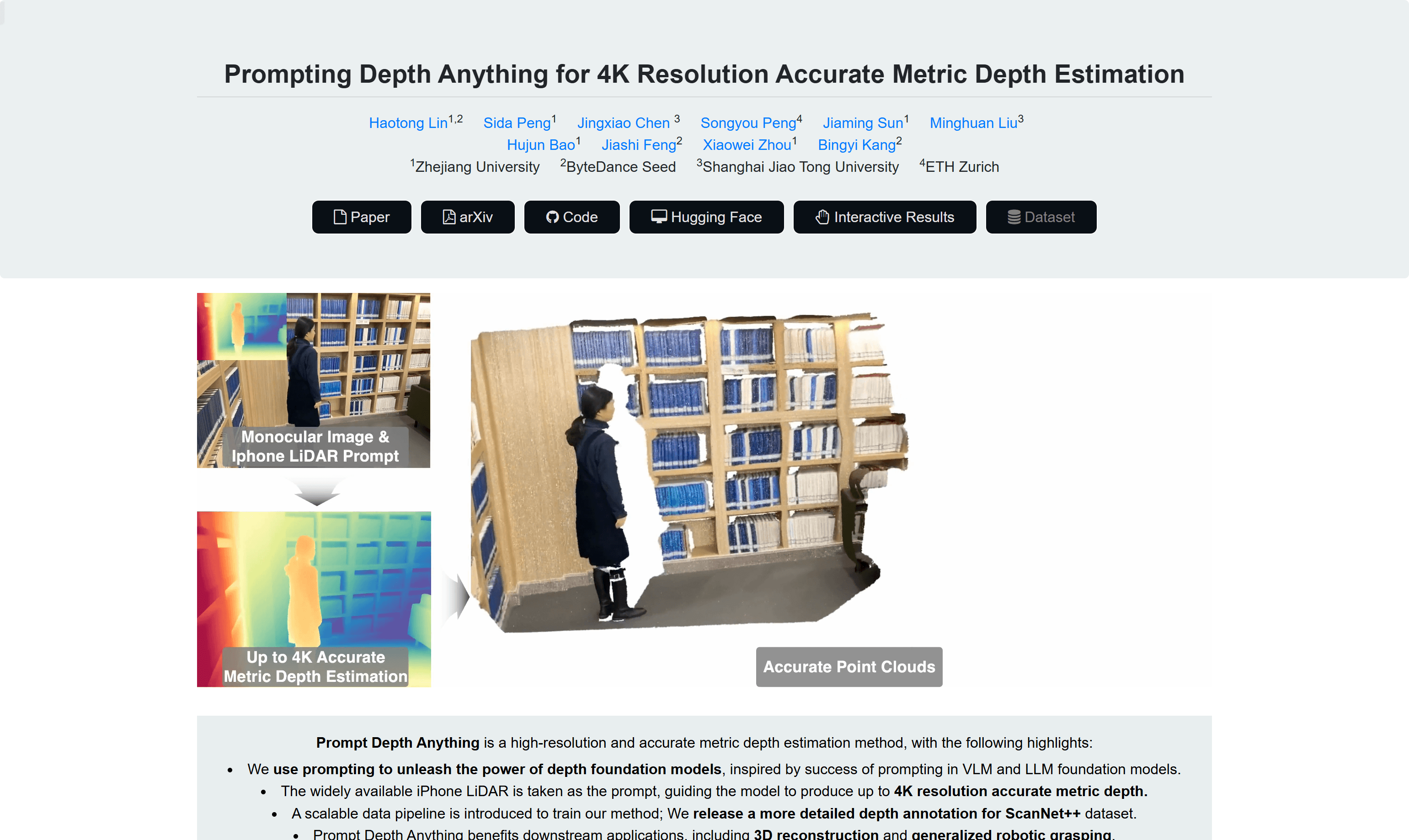
使用提示技术激发深度基础模型的潜力
利用iPhone LiDAR作为提示,实现高达4K分辨率的精确度量深度
引入可扩展的数据管道,包括合成数据LiDAR模拟和真实数据伪GT深度生成
在ARKitScenes和ScanNet++数据集上设立新的最先进水平
对下游应用如3D重建和通用机器人抓取有益
通过交互式结果页面展示实际应用效果
提供详细的深度注释,增强数据集的可用性
使用教程
1. 访问Prompt Depth Anything的官方网站。
2. 下载并查看提供的论文和代码,了解技术细节。
3. 通过交互式结果页面,观察不同深度估计技术的效果对比。
4. 利用提供的代码和数据集,在自己的项目中实现深度估计。
5. 根据需要,调整模型参数以适应特定的应用场景。
6. 将深度估计结果应用于下游任务,如3D重建或机器人抓取。
7. 参考提供的案例,了解如何将技术集成到实际应用中。
8. 通过Hugging Face平台,与其他开发者共享和讨论技术进展。










