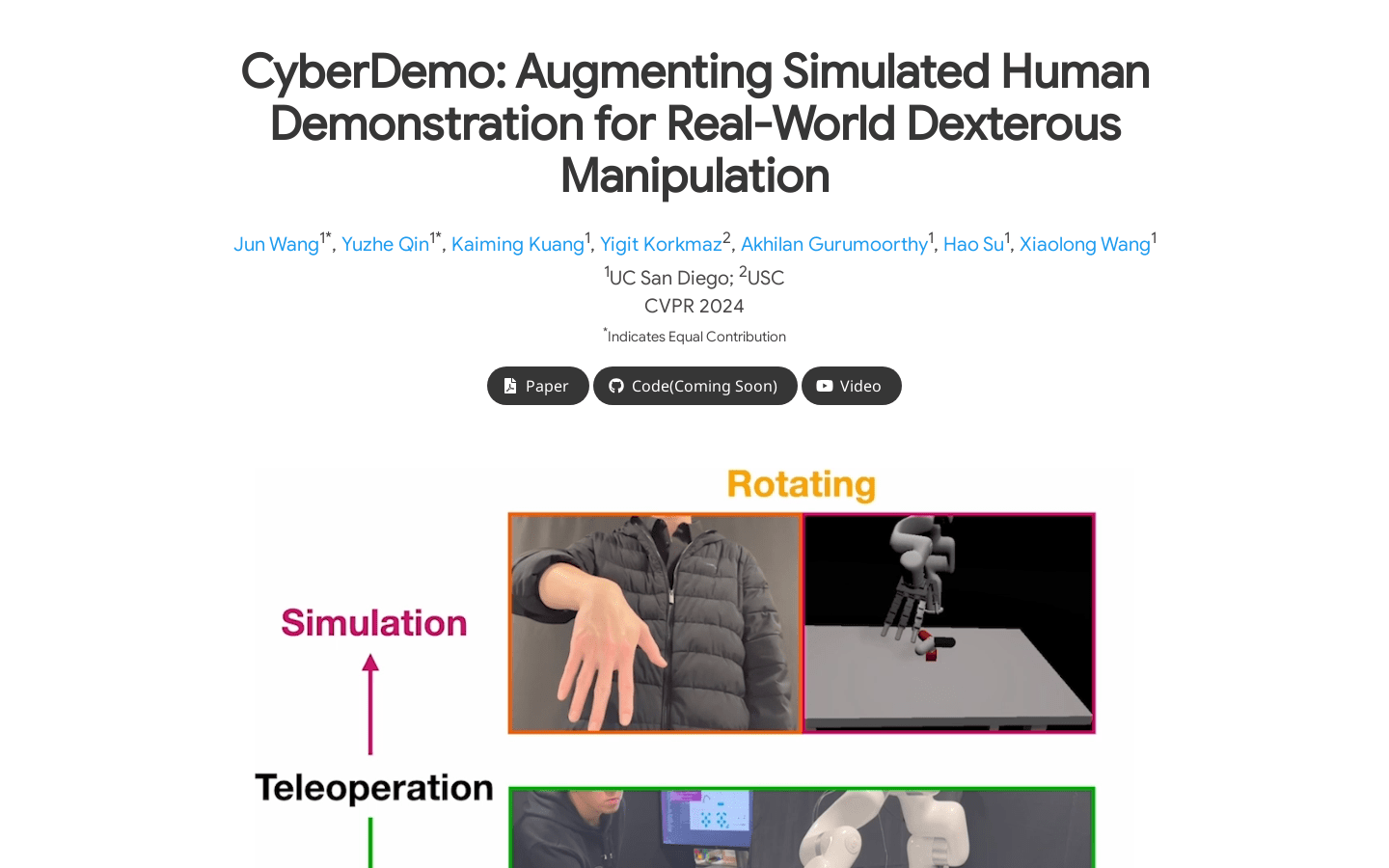
使用场景在复杂环境中训练机器人执行精细任务利用模拟数据提高机器人在现实世界中的操作精度研究和开发能够模仿人类手部动作的机器人技术产品特色模拟人类演示增强现实世界...
AI机器人,AI模拟,机器人技术,机器学习,模拟,灵巧操作,普通产品,开源,
08月01日
0
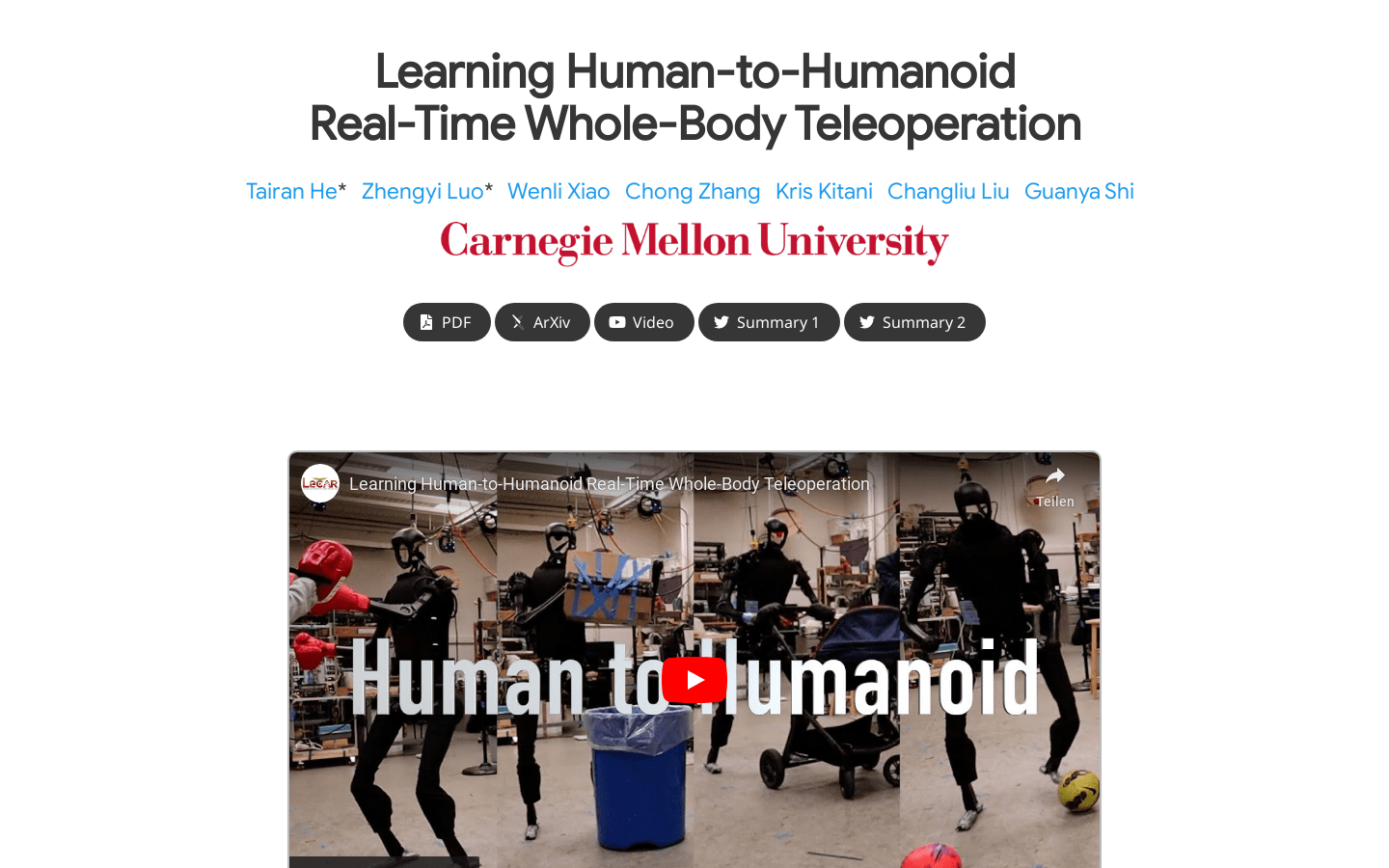
使用场景在远程手术中控制人形机器人执行精细操作在危险环境中使用人形机器人进行救援任务通过虚拟现实进行人形机器人的全身动作训练产品特色实时全身遥操作人形机器人控制...
AI角色生成,模型训练与部署,机器人技术,遥操作,人形机器人,实时控制,普通产品
08月01日
0
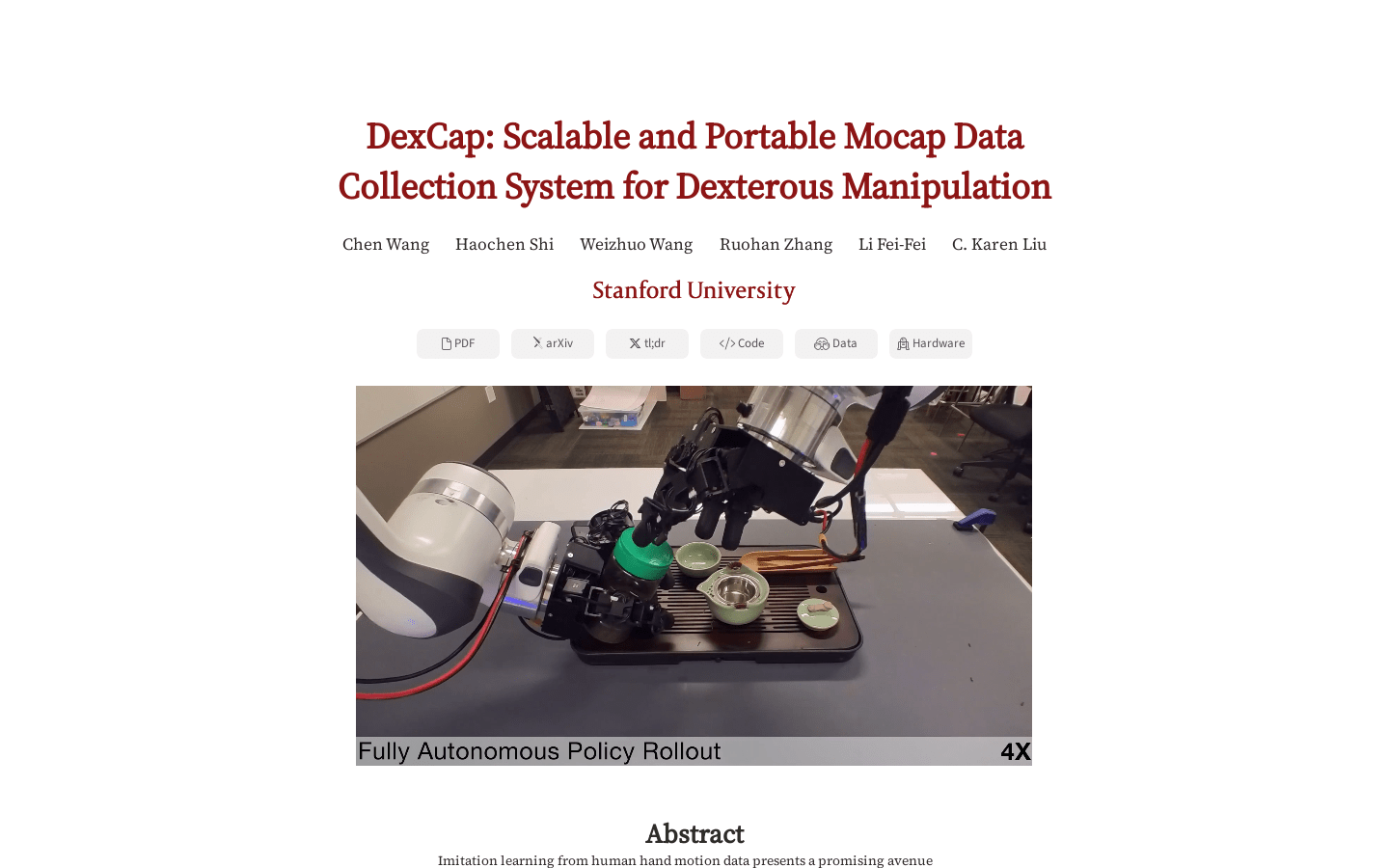
使用场景机器手控制技能训练人类手动作模仿学习动作数据收集与校正产品特色便携式手部动作捕捉逆运动学和基于点云的模仿学习人机协同校正机制数据集收集与校正
AI 3D工具,AI图像生成,机器人技术,运动捕捉,模仿学习,普通产品,开源,
08月01日
0
使用场景制造企业利用Hillbot的AI机器人提高生产线的自动化水平物流公司使用Hillbot的机器人进行仓库管理和货物分拣家庭用户通过Hillbot的AI机器...
AI模型,开发与工具,机器人技术,具身AI,AI大脑,工业应用,家庭服务应用,普通产品
08月01日
0
使用场景四足机器人在不同地形上的行走测试。瑜伽球上四足机器人的平衡和行走。灵巧操作任务,如立方体旋转。产品特色自动化构建奖励函数:根据目标任务自动生成适合的奖励...
AI开发助手,AI模型,人工智能,机器学习,机器人技术,自动化,模拟到现实,普通产品,开源,
08月01日
0
使用场景在ALOHA环境中使用ACT策略进行机器人操作任务的研究。使用SimXArm环境和TDMPC策略进行机器人臂操作的模拟。利用PushT环境和Diffus...
AI开发助手,AI模型,机器学习,强化学习,模仿学习,PyTorch,机器人技术,普通产品,开源,
08月01日
0
使用场景研究人员使用1X 世界模型来评估机器人在家庭环境中执行清洁任务的能力。开发者利用该模型来测试和改进机器人在办公室环境中的导航和交互策略。教育工作者使用1...
模型训练与部署,AI模型,机器学习,虚拟模拟,机器人技术,评估工具,数据集,普通产品
08月01日
0
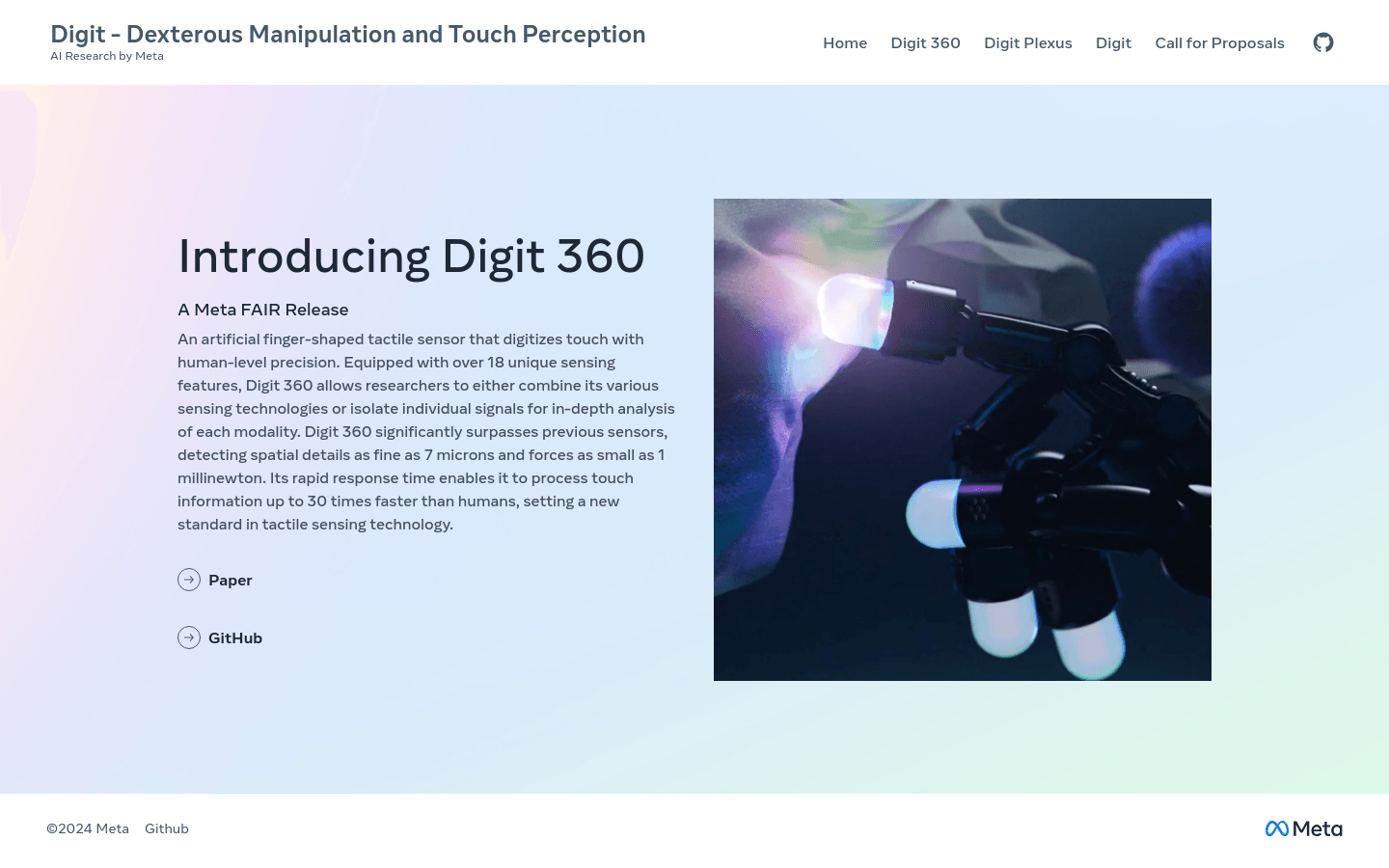
使用场景在机器人手术中,Digit 360可以提供精确的触觉反馈,帮助提高手术的精确度和安全性。在工业自动化中,Digit 360可以用于检测和处理精细部件,提...
研究工具,开发与工具,人工智能,触觉传感器,机器人技术,数字化触觉,Meta FAIR,普通产品
08月02日
0
使用场景物流中心使用Apptronik的机器人手臂进行货物搬运,提高了装卸效率。制造业工厂部署外骨骼技术,减轻工人负担,提高生产效率。研究实验室利用仿人上半身进...
机器人,AI模型,机器人技术,人形机器人,自动化,人工智能,工业4.0,普通产品
08月02日
0
使用场景在IsaacGym到IsaacSim的迁移中,ASAP显著提高了机器人动作的流畅性和准确性。在IsaacGym到Genesis的迁移中,ASAP通过残差...
模型训练与部署,机器人,人工智能,机器人技术,模拟与现实对齐,运动控制,敏捷技能,普通产品
08月02日
0